Researchers at Penn State are developing an automated robotic system for precision weed management in apple orchards. The goal is to detect and measure weeds with enough accuracy to guide a targeted herbicide sprayer, reducing chemical use and avoiding crop or environmental injury.
The team reported an early stage of the project in Computers and Electronics in Agriculture, presenting a machine-vision model designed to identify and track weeds from a side-view camera. Traditional top-view systems are limited in orchards because branches and canopy structures obstruct the ground. According to project lead Long He, "In complex environments like apple orchards, it is difficult to develop weed-detection mechanisms because the tree canopy and low branches block the view from above." He said weeds may also be partially hidden behind trunks or other vegetation.
 © The Pennsylvania State University
© The Pennsylvania State University
To address this, doctoral researcher Lawrence Arthur led the adaptation of an existing deep-learning model that performs fast object detection and pixel-level segmentation. The team added a module that improves the model's ability to focus on relevant image features while suppressing less useful visual information. This helped the system detect weeds even when they were partly obscured. A tracking algorithm with a filtering mechanism was integrated to maintain weed identity across video frames and prevent double-counting.
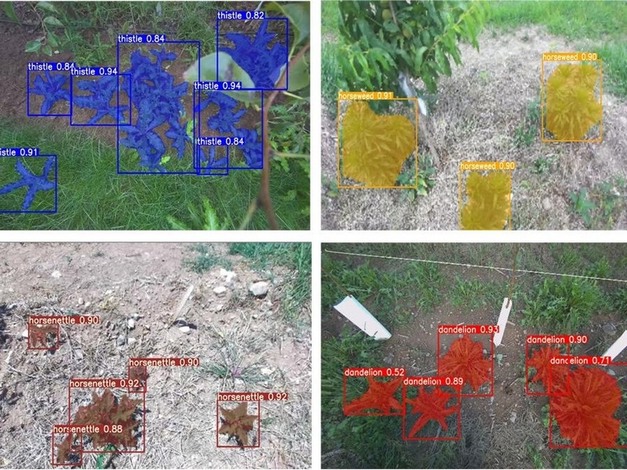
Data was collected at Penn State's Fruit Research and Extension Center in Biglerville and nearby orchards, using species such as dandelion, common sow thistle, horseweed, and Carolina horsenettle. High-resolution images were used for model training and evaluation.
The model achieved 84.9 per cent average precision for segmentation and 83.6 per cent for localization. In tracking tests across frames, the system reached 82 per cent multiple-object tracking accuracy, 78 per cent tracking precision, and an 88 per cent identification score, recording six identity switches.
He said the combined detection, tracking, and density estimation functions provide "more accurate, consistent weed detection, even in difficult orchard conditions," adding that such data can support site-specific herbicide applications.
Contributors to the project include Caio Brunharo, Paul Heinemann, Magni Hussain, and Sadjad Mahnan. Funding came from the U.S. Department of Agriculture's National Institute of Food and Agriculture, the Pennsylvania Department of Agriculture, and the State Horticultural Association of Pennsylvania.
For more information:
The Pennsylvania State University
Tel: +1 814 865 4700
www.psu.edu









