Agriculture is an industry where margins are low and so cost efficiency and time efficiency are critical issues. The implementation of a robotic system would enable certain advantages such as a more flexible work force and night-time operations, furthermore the robots must be developed to work in harsh conditions and in highly uncertain and unknown environments.
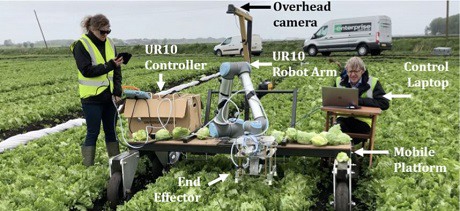
One specific challenge is performing manipulation for autonomous robotic harvesting. Engineers at the University of Cambridge have developed a system to automate the harvesting of iceberg lettuce. Compared to other produce, iceberg is challenging to harvest as the crop is easily damaged by handling and is very hard to detect visually. A platform called Vegebot has been developed to enable the iterative development and field testing of the solution, which comprises of a vision system, custom end effector and software. A bespoke vision and learning system has been developed which uses two integrated convolutional neural networks to achieve classification and localization. A custom end effector has been developed to allow damage free harvesting.
"The goals were to achieve a robust localization and classification, to achieve a cycle time comparable to humans and to avoid damage to harvested lettuces. The localization and classification were reasonably robust, as demonstrated by a localization success of 91% and a classification accuracy of 82% when tested on a significant test data set. The average cycle time on Vegebot (31.7s) was restricted by the weight of the end effector and thus currently slower than humans, but could be easily improved using lighter materials. Although the harvest success rate was high (88.2%) the damage rate was poor (38%), future work is required to reduce the damage rate and further optimization is required to meet supermarket standards," the scientists explained.
Although the techniques and approaches have been applied to iceberg lettuce, the concepts described could be applied to other harvesting and robotic agriculture situations. Further work to investigate wider applicability, and developing a more universal harvesting system would increase both commercial and research impact.
Source: Simon Birrell, Josie Hughes, Julia Y. Cai, Fumiya Iida, 'A field‐tested robotic harvesting system for iceberg lettuce', 2019, Journal of Field Robotics.